交通流(走行調停)
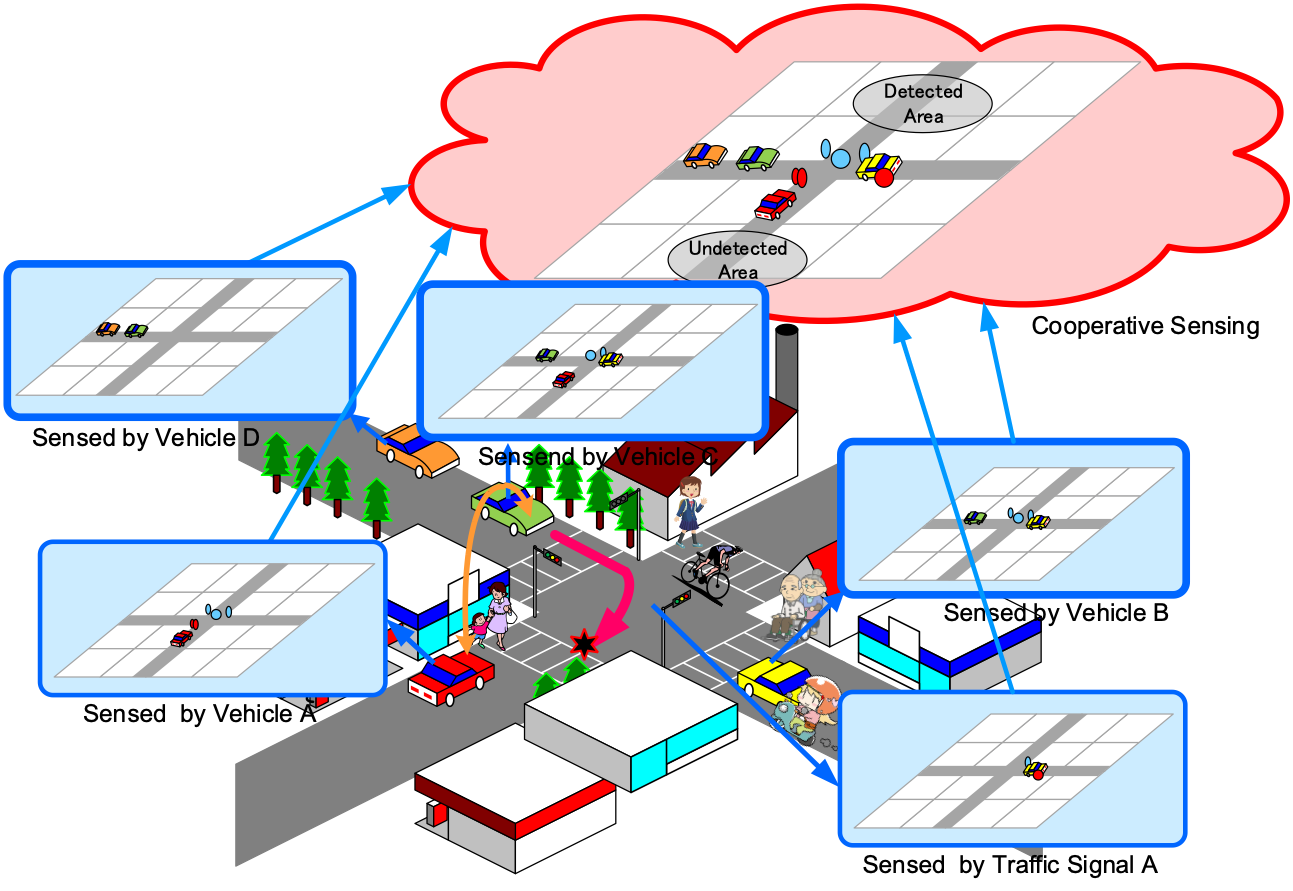
車両間の通信や,車両と道路インフラとの通信を用いることで,通信範囲内にいる車両や道路インフラとの情報交換が可能となり,自車でセンシングした周辺の情報だけでなく,より広範囲の情報を取得し活用することができます.そのような交通システムは協調型ITS(Cooperative Intelligent Transport Systems)と呼ばれ,道路交通の安全・安心・快適を目的とした協調型運転支援を実現します.
当研究室では,協調型運転支援(協調センシング・協調制御)におけるリアルタイムのデータ収集,処理,配信技術を用いて,合流,車線変更,交差点通過などの様々な状況における走行調停の研究を行っています.
これらの研究によって,交通流の円滑化や運転の安全性や快適性の向上,協調型自動運転の実現が期待されます.
ダイナミックマップ
協調型ITSにおいて,交通に関するデータの収集,管理,活用を支援する基盤システムとして,ダイナミックマップが考えられています.ダイナミックマップとは,地理地図のような静的情報から車両や歩行者の位置のような動的情報まで一括して管理することが可能な手法で,それを用いることで自動運転車は自車に付けられたセンサーが感知できる範囲よりも幅広い範囲の情報を得られることが期待されます.
当研究室では,このダイナミックマップを用いた交通制御やネットワーク制御,走行管理調停などの研究を行っています.
これらの研究によって,交通流の円滑化や運転の安全性や快適性の向上が期待されます.

時空間グリッド予約
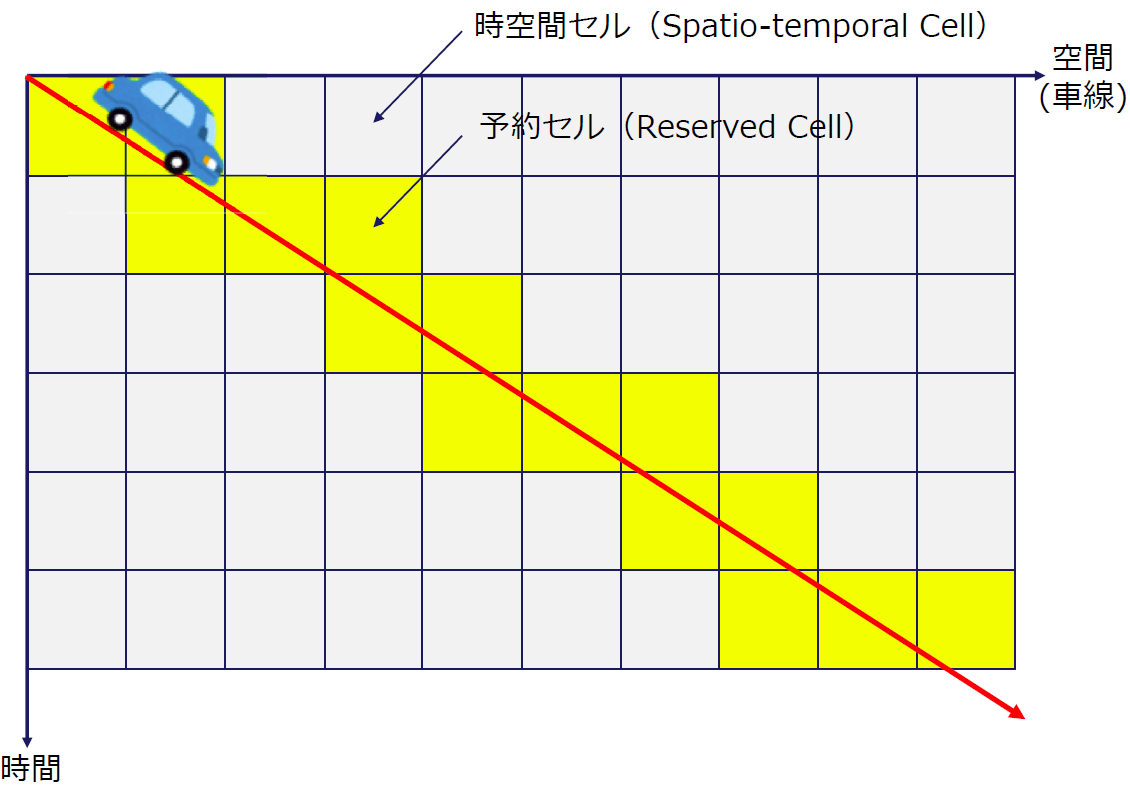
ダイナミックマップを用いた走行管理調停の研究の一つとして,時空間グリッド予約というものがあります。
これは,ダイナミックマップ上で時間と道路上の空間をグリッドに分割したものを管理し,そのグリッドに対して車両が経路予約をしていくことで,各車両がそれぞれの走行計画を共有できる仕組みになっています.
当研究室では,この時空間グリッド予約を用いた走行調停の研究を行っています.
これらの研究によって,より効率的な走行が実現することが期待されます.
セキュリティ
車両が様々のモノとつながり,通信する協調型ITSにおいて,セキュリティ対策は必要不可欠です.一般的な情報セキュリティでの脅威に加えて,ITS特有の脅威への対策を考える必要があります.また,個人情報を含むメッセージが車両から外部に送られたり,簡単にトラッキングができたりする場合,ドライバーにとっては重要なプライバシーの問題となります.
当研究室では,車両相互監視や仮名,ブロックチェーンなどの技術を用いて,ITSのセキュリティに関する研究を行っています.
これらの研究によって,車両の安全性や完全性,プライバシーを保護することが期待されます.
また,当研究室には自動車の運転・走行をシミュレートできるドライビングシミュレータがあり,運転・走行に関する研究に対応可能な実験環境があります.
