こんにちは,広報の寺崎(B4)です.
2026年6月8日の第178回月例発表会(M2)において,富成 泰生,野田 虎之介,藤原 直己,松浦 薫,森 梓恩,徳重 柊人,ニコラ カラムビア,文 治欽の8名が以下のタイトルで発表を行いました.
ダイナミックマップを利用した歩行者の移動予測モデルに基づく車両接近通知手法の検討 (富成 泰生)
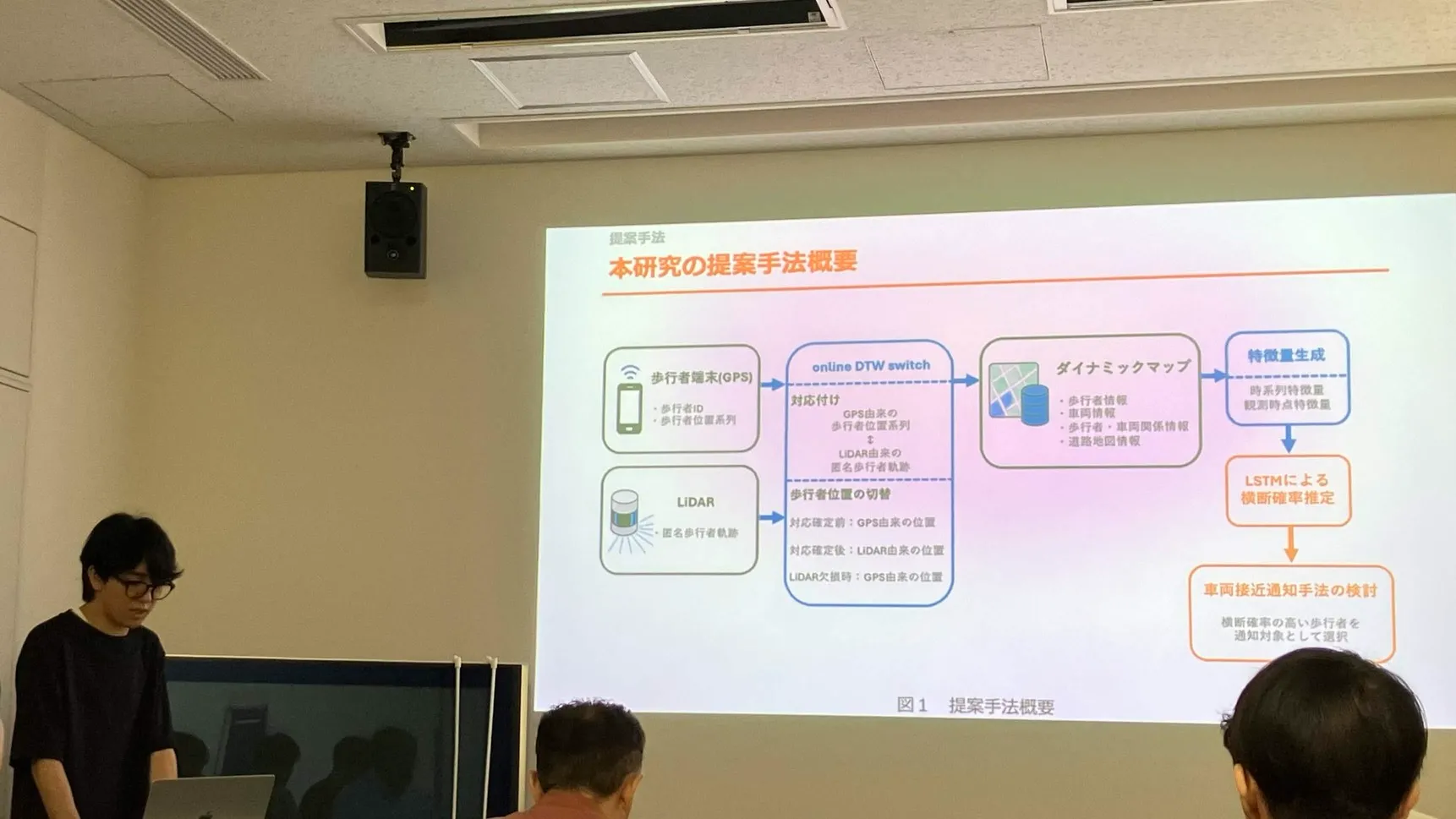
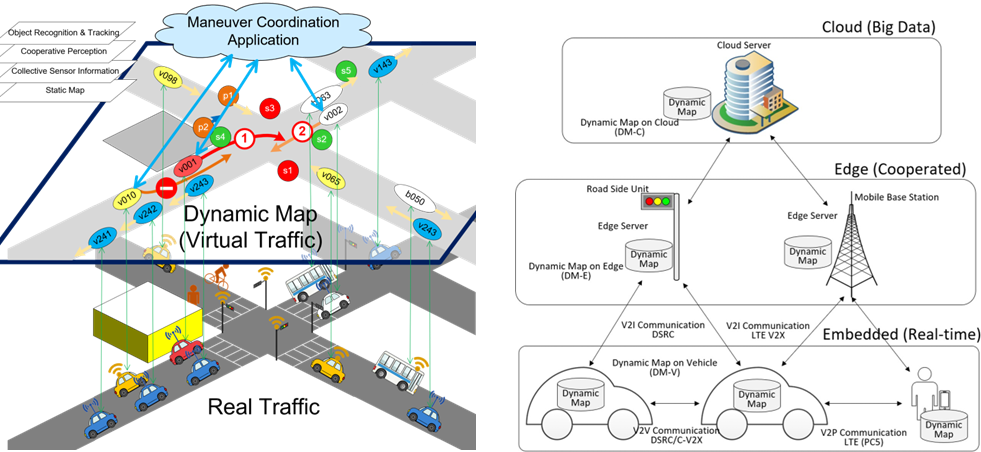
歩行者への車両接近通知は,交通事故低減に有効であると期待されている.本研究では,車両情報および歩行者情報をサーバ上のダイナミックマップに集約し,歩行者が近い将来道路を横断する確率を表す横断確率に基づいて通知対象を選択した上で,歩行者端末へ車両接近を通知する方式を想定する.しかし,車両周辺のすべての歩行者へ一律に通知すると,通知過多により注意力の低下や警告への信頼性低下を招く可能性がある.そのため,横断確率が高い歩行者を特定し,必要な場合にのみ通知することが
重要である.歩行者位置の取得には,歩行者 ID と対応した位置を広域に取得できる GPS(Global PositioningSystem)と,局所的に高精度な位置を取得できる LiDAR(Light Detection and Ranging)が利用できる.一方で,GPSには測位誤差や観測頻度の低さがあり,LiDAR には遮蔽による未検出や匿名軌跡であるという課題がある.そのため,GPS 由来の歩行者位置系列と LiDAR 由来の匿名歩行者軌跡をリアルタイムに対応付け,適切に利用する必要がある.また,歩行者の横断行動は現在位置や車両との関係だけでなく,目的地や進行方向にも依存すると考えられる.そこで本研究では,ダイナミックマップ上で歩行者・車両情報,道路地図情報,目的地情報を統合的に管理し,これらを用いて歩行者の横断確率を推定し,その結果に基づいて通知対象を選択する車両接近通知手法を検討する.
安全な経路計画に向けた明示的矛盾伝播を伴う証拠理論ベースBEVマッピング手法の提案 (野田 虎之介)
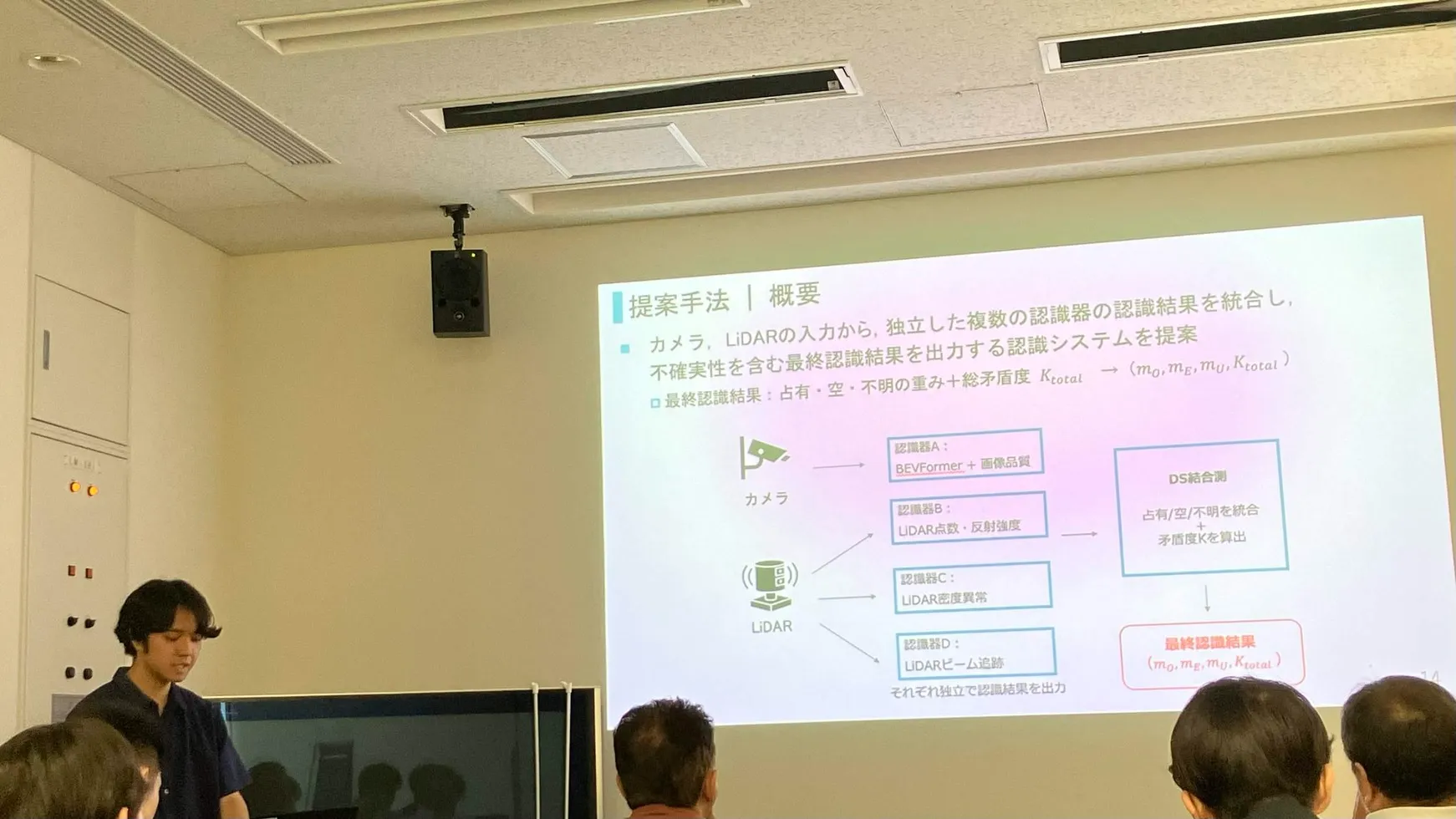
深層学習の発展に伴い,自動運転の鳥瞰図(BEV,Bird’s-Eye View)空間における周辺環境認識精度は大きく向上し,3 次元物体検出や,各セルに物体が存在するかを表す占有格子地図の出力といったタスクで高い精度を達成している.一方,悪天候やセンサ測定限界による入力データの劣化に対し,認識器が過度に自信を持って誤予測する脆弱性がある.特に致命的なのは物標を見落とす偽陰性(FN)であり,黒色車体や濃霧,LiDAR のビーム欠損等の低反射条件下では反射波が不足し,衝突に直結する FN が系統的に増加する.この一因は,BEV 認識の出力表現形式にある.一般的な占有格子地図は各セルを単一の占有確率(0~1)で表すため,占有か空かの 2 択しか表せず,観測できておらず判断できないという第 3 の状態を書き込む場所がない.そのため,センサ劣化で観測証拠が乏しくても,本来は判断を保留すべき領域を空として出力せざるを得ず,証拠が欠如しているだけの領域が物標なしと誤って扱われ,見落としを招いている.本来,知覚層の認識プロセスにおいては,どの認識器も判断材料を持たない「不明」状態と,異なる認識器の間で予測が食い違う「矛盾」状態といった不確実性を区別して保持できるはずである.自動運転システムにおいて,これらの情報を明示的に下流へ伝達できれば,経路計画層は不明領域での減速や矛盾領域の回避といったリスクを考慮した行動を生成できる.しかし現行システムは認識結果を決定論的な占有確率や 3 次元ボックスに圧縮して渡すため,こうした不確実性情報を活用する機構を欠く.そこで本研究では,課題の根本原因を「認識における不確実性を経路計画層に伝達できていないこと」と捉え直し,知覚層の不明や矛盾を明示的な信号として抽出し,下流の経路計画層へ適応的に伝達する新たな枠組みを提案する.
任意角度経路計画を用いた時空間ボクセル予約に基づく複数ドローンの飛行調停手法の検討(藤原 直己)
近年,物流やインフラ点検など多岐にわたる分野においてドローンの活用が進められており,都市部のような構造物が多数存在する環境下における活用が想定されている.複数のドローンが同一空域を飛行する場合,飛行経路が交差することによる衝突リスクが生じる.ドローンの衝突回避手法として,センサを用いて周辺環境を認識する手法があるが,各機体が認識できる範囲がセンサの検出範囲に限られることや,構造物が存在する環境において遮蔽された領域の状況を事前に把握することが困難である.
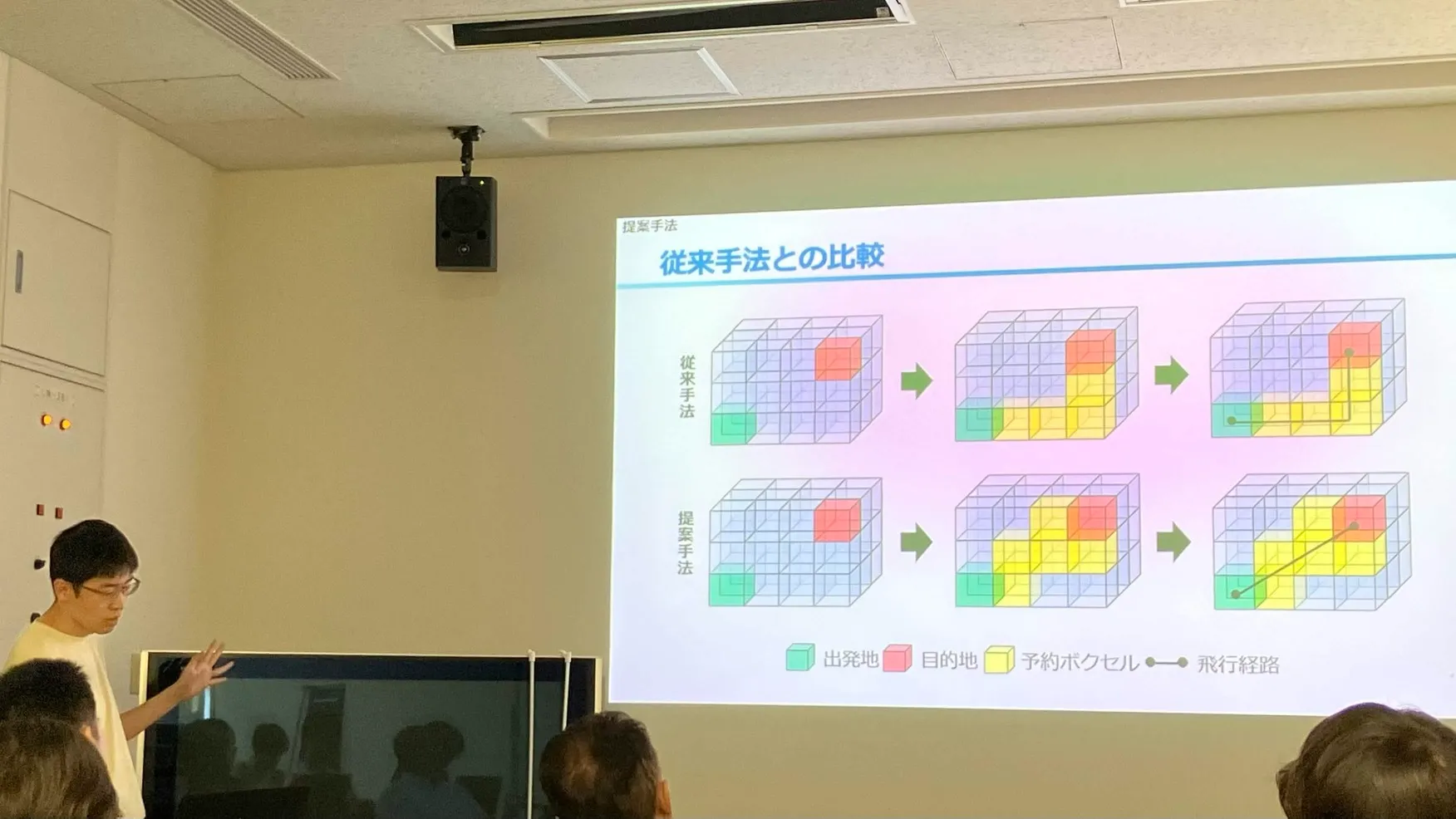
そのため,ドローンの飛行調停において 3 次元空間情報と時間情報を組み合わせて管理する時空間ボクセルの活用が検討されている.ドローンの通過予定領域を事前に予約することで,複数機の時空間的な競合を抑制する.しかし,従来の時空間ボクセル予約手法では,隣接するボクセル間の接続に基づいて経路を計画するため,可能な進行方向が人工的に制約され,連続空間上における最短経路と比較して経路が冗長化する場合がある.そこで本研究では,任意角度経路計画を用いた時空間ボクセル予約に基づく複数ドローンの飛行調停手法を提案する.隣接していないボクセル間において,障害物や他機の予約と干渉しない場合は,2 つのボクセルを直接接続する.これにより,経路の自由度を高め,経路長の短縮を目指す.
協調型自動運転のためのMedia over QUIC を用いたセンサデータ伝送方式の提案(松浦 薫)
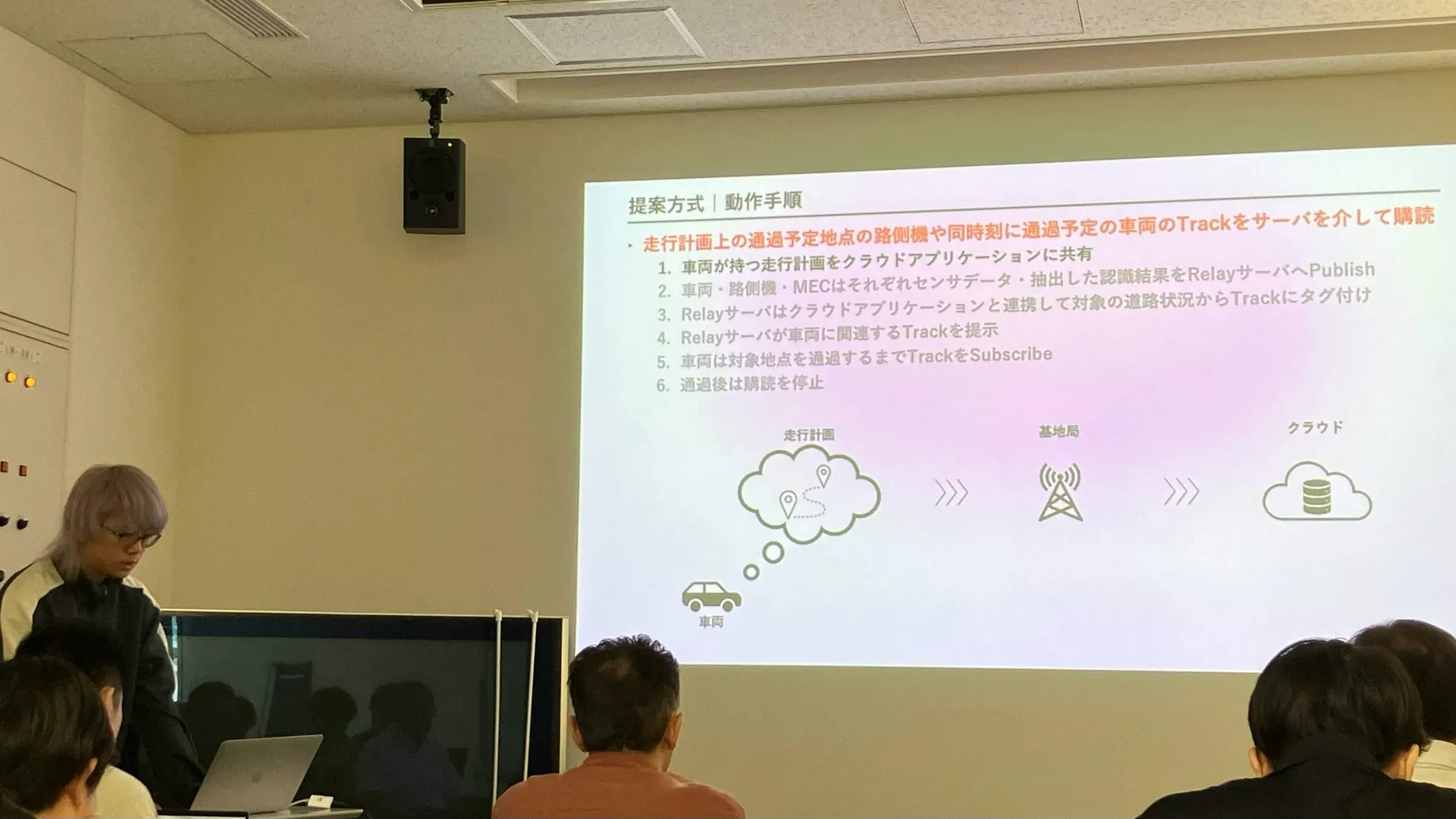
自動運転の社会実装に向けて、車載センサでは得られない走行予定の道路状況や交通状態などを車両へ提供することで安全で円滑な走行を支援する協調型自動運転技術が注目されている。特に、携帯電話網を介した Vehicle-toNetwork(V2N)通信は、広域情報の収集や、基地局やネットワーク近傍に配置された計算資源である Multi-access EdgeComputing(MEC)との連携、複数車両への情報配信、車両の遠隔監視などに適している。ここで、5G の携帯電話網は利用可能な通信帯域や遅延の変動が激しいため、効率的な通信をすることが求められる。
本研究では、協調型自動運転における数秒から数十秒先の走行判断を支援するために、車両や路側機からセンサデータを MEC やインターネット上のサーバを介して、走行予定経路に基づいて選択的に購読する方式を提案する。この方式により、V2N 通信における通信帯域使用量と中継機器の処理負荷を削減しつつ、運転支援に重要な情報を対象区間到達前に取得することを目指す。そして、生データや抽出された特徴量データなど様々なデータ形式や送信周期を考慮した通信実験を、交通シナリオを模したシミュレーション環境で行い、帯域制約下における通信性能と配信規模に応じた処理負荷を定量的に評価し、提案方式の有効性を検証する。
車両合流時における NR-V2X ユニキャスト利用時の通信信頼性向上の検討(森 梓恩)
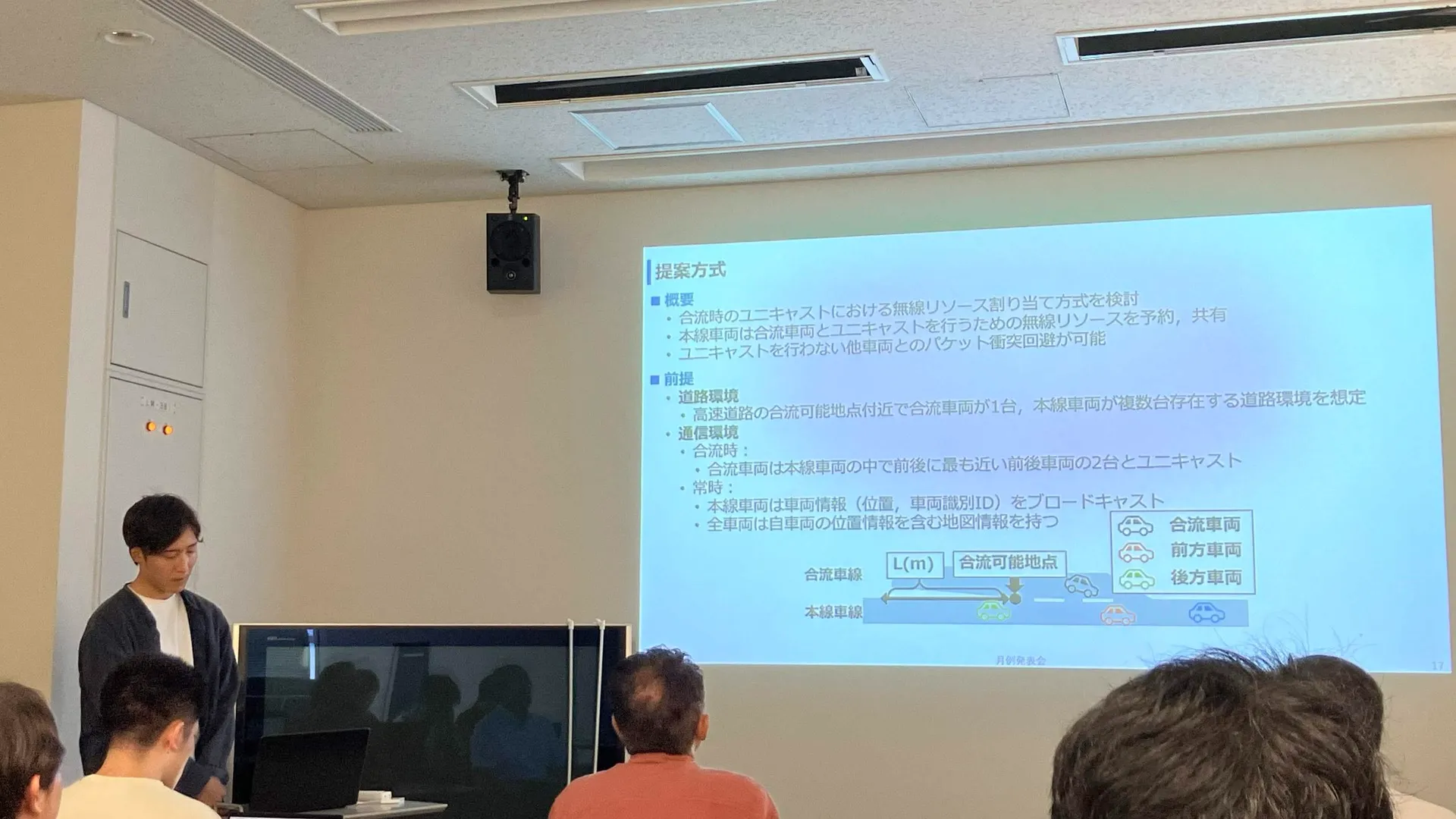
自動運転の高度化に伴い高信頼・低遅延を満たす通信の実現が求められる.そこで車両同士が直接通信を行う車車間通信の研究が行われている.車車間通信の規格として,LTE 技術を応用した LTE-V2X PC5 や 5G 技術を応用したNR-V2X PC5 がある.両規格はブロードキャストが可能であるが,NR-V2X PC5 では 1 対 1 通信に特化した通信方式であるユニキャストが可能である.ユニキャストは受信確認や再送制御が可能であるため,ブロードキャストより高い通信の信頼性が期待できる.車車間通信を行うユースケースとして,高速道路の合流可能地点付近で,合流車線を走行する合流車両と本線車線を走行する本線車両が協調的に合流を行う合流時がある.以降,協調的に合流を行う複数車両を合流協調車両と定義する.合流協調車両間の通信では,通常時の車両間と比較して高信頼・低遅延な通信要件が求められる.そこで合流協調車両間のユニキャストが期待できる.車車間通信において,通信を行うためにパケットを送信する時間と周波数を表す無線リソースを車両が自律的に選択する.車車間通信の無線リソース割り当て方式として SPS(Semi-Persistent Scheduling)方式がある.SPS 方式では,他車両が使用する無線リソースや受信電力を取得して,自車両の無線リソースの選択候補から除外することで,信頼性の高い無線リソースを選択できる.
しかし,SPS 方式は各車両が互いの通信要件を満たすための協調的な無線リソース割り当てを行わないという課題がある.そのため合流時のように異なる通信要件の車両が混在する環境の場合,各車両の通信要件を満たせない可能性がある.本研究では,合流協調車両間でユニキャストを行う無線リソースを予約,共有する新たな無線リソース割り当て方式を検討する.合流時の通信要件を考慮した協調的な無線リソース割り当てが可能になり合流協調車両間の通信信頼性向上を実現する.
LLM を用いた視線と自然言語のリアルタイムなグランディングによるマルチモーダル UAV 制御手法の提案(徳重 柊人)
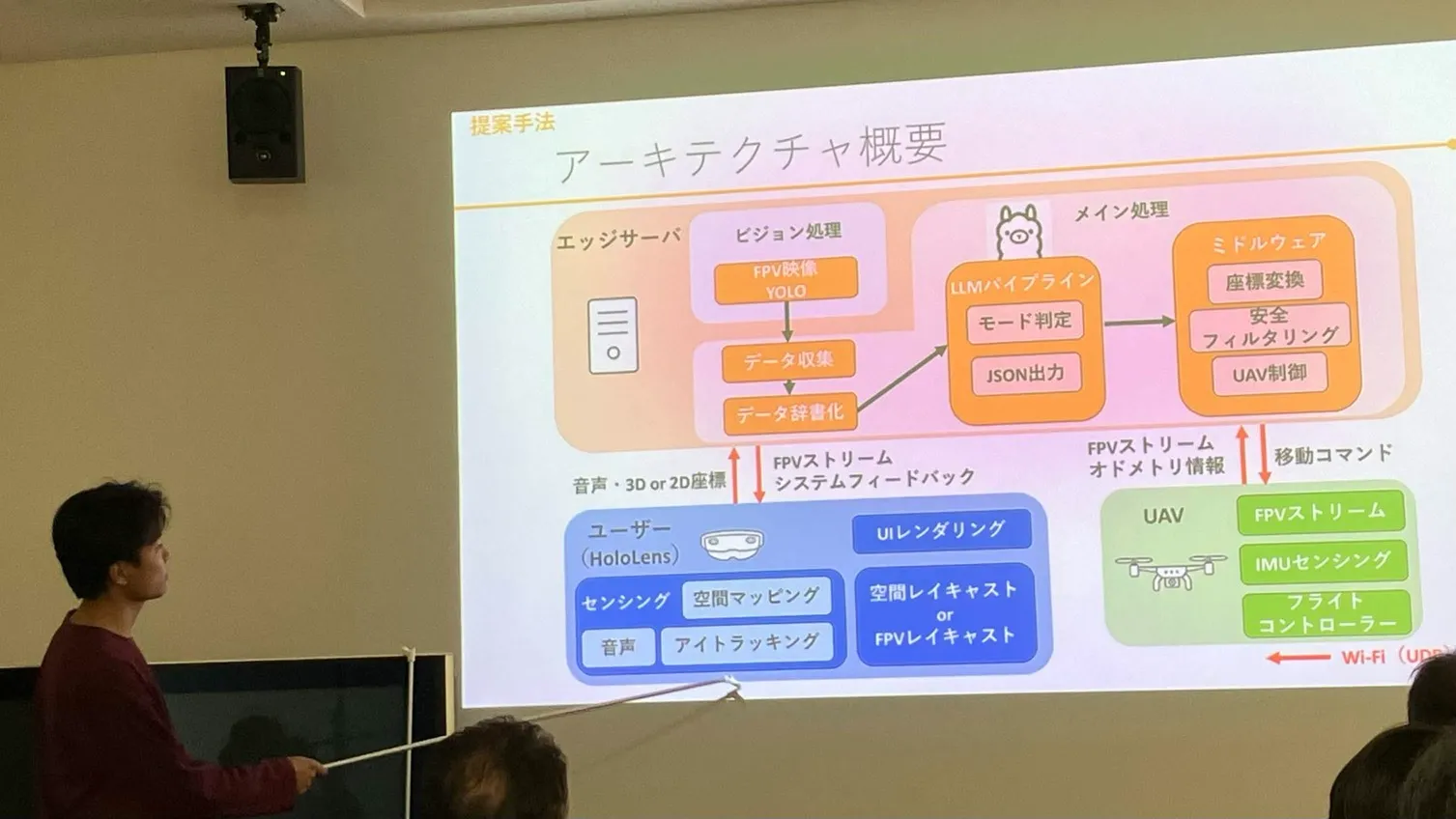
近年,無人航空機(UAV:Unmanned Aerial Vehicle)はインフラ点検・災害対応・物流など幅広い分野への活用が進んでいる.大規模言語モデル(LLM: Large Language Model)の発展を背景として,自然言語命令で UAV を制御する研究が注目されている.しかし,ユーザーと UAV では空間上の視点位置が大きく異なるため,自然言語のみの指示では「あそこの箱」といった指示対象の空間的曖昧さが生じ,LLM とユーザー間の意思疎通が図れないグランディング問題が課題となっている.この課題の解決策として,視覚言語モデル(VLM:Vison Language Model)を用いてUAV のカメラ映像から状況を理解させる手法が提案されている.しかし,高度な VLM の常時実行は計算コストと通信遅延を増大させ,リアルタイムなインタラクションを阻害する.また,ユーザーが常にドローンの視点(FPV:First Person View)映像に依存して操作を行うアプローチは,現実空間の状況把握との間で頻繁な視線移動や注意の切り替えを強いられ,ユーザーの認知負荷を増大させるという問題がある.そこで本研究では,UAV との協働において,ユーザーの認知負荷を抑制しつつ,低遅延かつ直感的な意思疎通を実現することを目的とする.具体的には,空間コンピューティング技術(MR:Mixed Reality)を用いてユーザーの現実空間の視界(EV:Egocentric View)と FPV を統合し,ユーザーの視線の対象と自然言語による制御指示から LLM が文脈を解釈するマルチモーダル自然言語 UAV 制御手法を提案する.自然言語指示内容やユーザー行動に応じて,システム側が最適な UAV の制御方式を動的に決定・切り替
えるアプローチをとる.本手法により,高コストな VLMなどの計算資源に依存することなく空間的曖昧さを解消し,人間の認知プロセスに寄り添ったシームレスで効率的な UAV 操作の実現が期待できる.
Autonomous Vehicle Route Adjustment via V2X PedestrianTrajectory Prediction in Shared Spaces(ニコラ カラムビア)
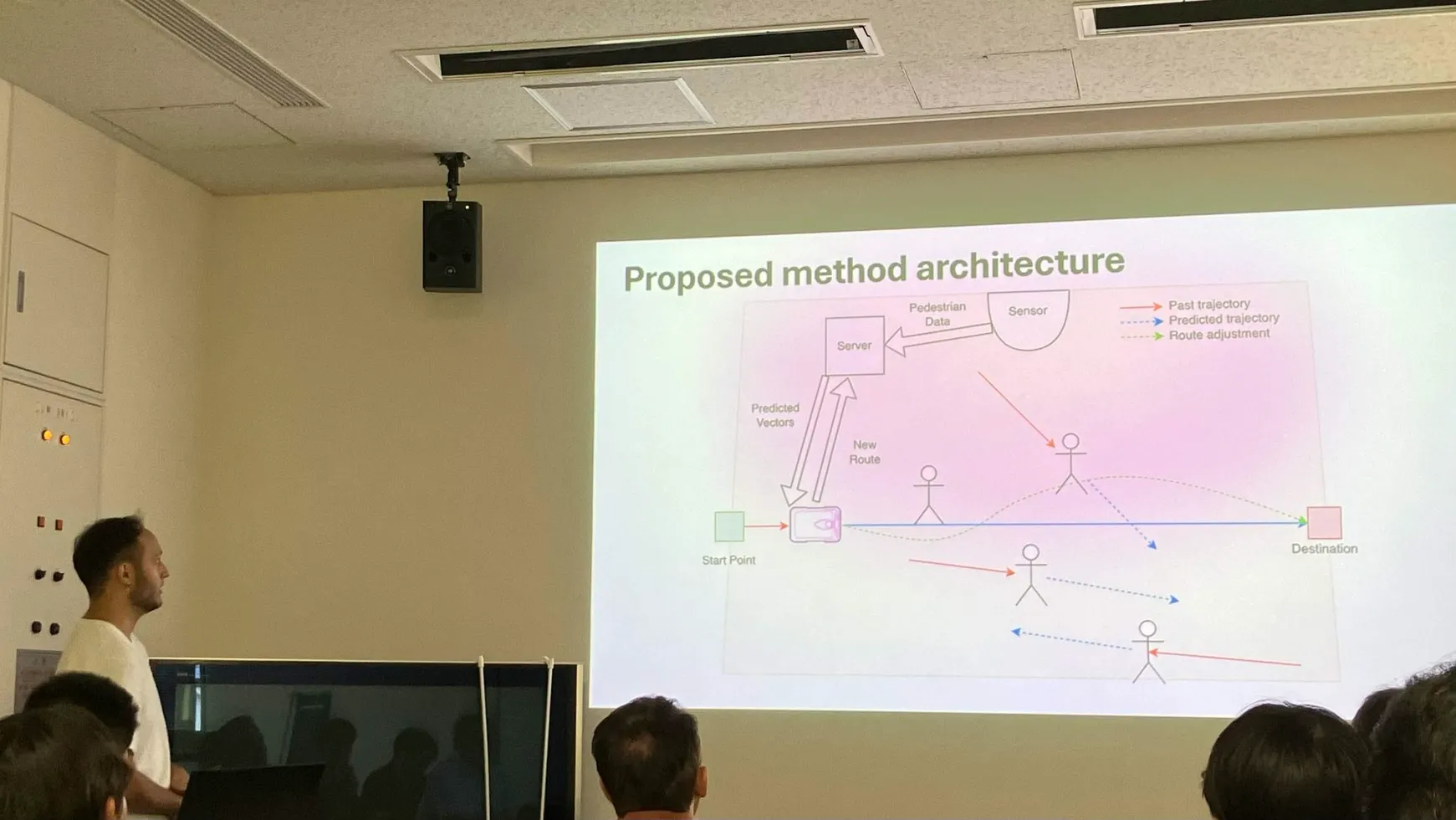
Integrating Autonomous Vehicles (AVs) -such asautonomous delivery robots- into shared spaces represents a critical frontier in modern urban mobility.Unlike structured roads with clear lane markingsand traffic signals, shared spaces are characterizedby the chaotic and informal coexistence of vehicles and pedestrians. In these environments, current AV navigation systems rely heavily on reactive ego-vehicle perception, which defaults to overly conservative hard braking when facing unpredictable pedestrian movements. This purely reactive approach causes constant stopping, severely hindering efficiency and makes real-world autonomous services impractical.To address this challenge, this research explores an autonomous vehicle route adjustment framework that leverages Vehicle-to-Everything (V2X) communication for pedestrian trajectory prediction. By enabling proactive path adjustments rather than reactive braking, this framework aims to significantly reduce the number of stops and optimize the overall time to destination. Our core hypothesis is that V2X-informed trajectory prediction drastically improves AV navigation efficiency inside shared spaces.
熱赤外および高分光情報融合による植物水分ストレス検出手法の提案(文 治欽)
近年,地球温暖化の進行に伴い,高温や干ばつなどの異常気象が世界各地で増加している。これらの環境ストレスは農作物の生育や収量に大きな影響を与えるため,植物の水分ストレス状態を早期に把握し,適切な灌漑管理を行うことが重要である。
従来の農業現場では,目視観察や土壌水分計測による管理が行われているが,大規模農地では作業負担が大きく,植物内部の水分状態を直接把握することは困難である。そのため,熱赤外や高分光センシングを利用した非破壊かつ高精度なストレス評価技術が注目されている。熱赤外情報は植物の蒸散状態や葉面温度変化を反映できる一方で,周囲環境の影響を受けやすい。高分光情報は植物内部の水分状態や生理的変化を反映できるが,単独では十分な判別性能が得られない場合がある。
そこで本研究では,熱赤外情報と高分光反射情報を融合し,機械学習を用いて植物水分ストレスを高精度に検出する手法を提案する。