こんにちは,B4の鐵野です.
2025年度の修士論文試問会において,田牧 浩月(M2),髙田 陽輝(M2),岩井 駿人(M2),松本 翔汰(M2),梅田 寛斗(M2)の5名が以下のタイトルで発表を行いました.
自動運転車両による複数歩行者への意思提示可能なeHMIの有効性検討(田牧 浩月)
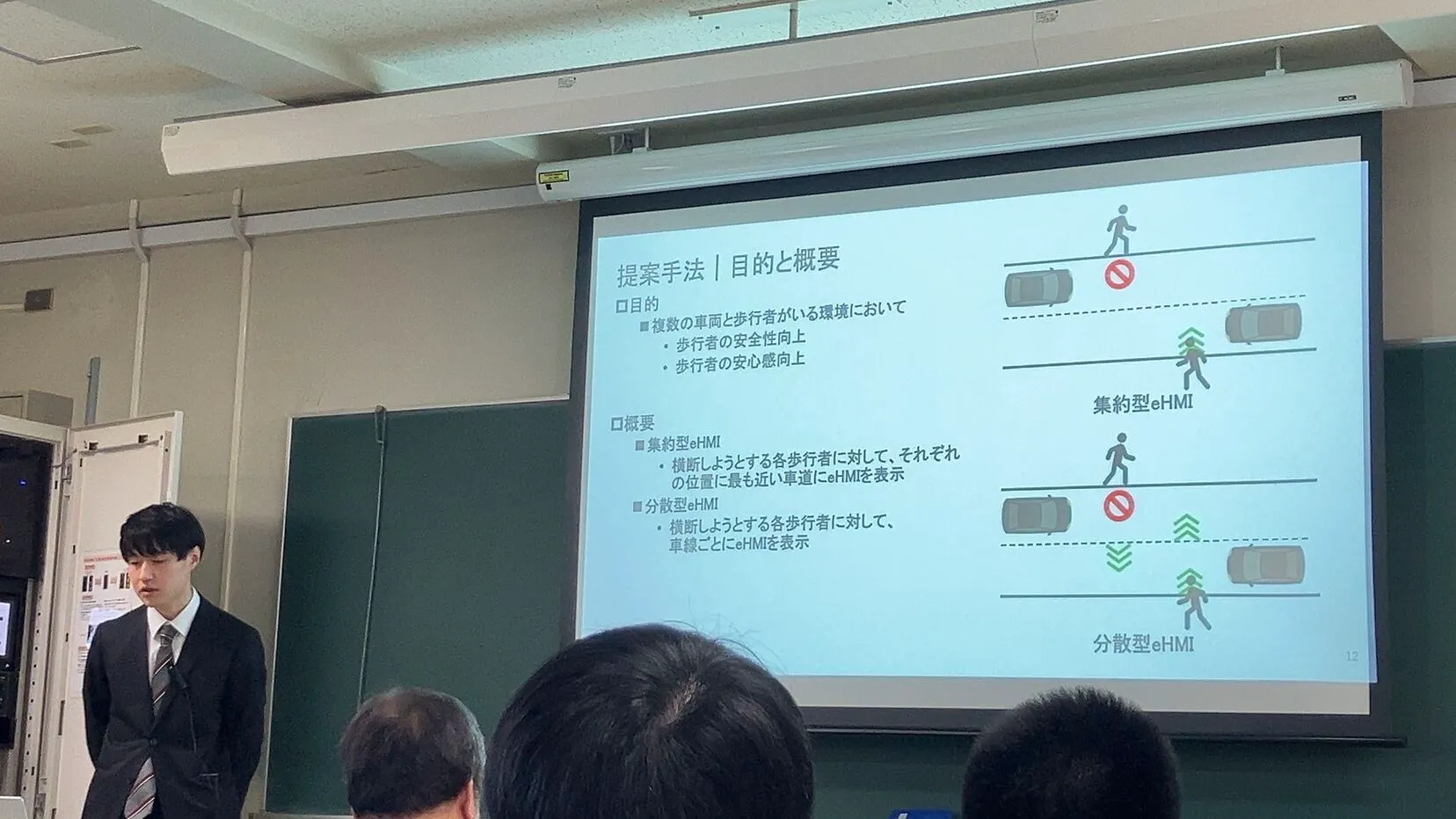
近年,自動運転車両の開発が進んでおり,交通事故を引き起こす人為的な誤りを減少させることが期待されている.しかし,運転者が不在の自動運転車両では,歩行者は車両側の走行に関する意図が不明瞭であり,歩行者の安全性や安心感に対して影響を及ぼす問題がある.例えば,手動運転車両の場合,歩行者は車速情報に加えて,運転者とのジェスチャーやアイコンタクトなどの非言語的なやり取りを通じて,安全に横断できるタイミングを判断できる.一方で,自動運転車両の場合,歩行者は運転者との非言語的なやり取りを行えない場合があるため,車両の進行意図や停止意図を把握しにくく,横断に対する意思決定が困難になる.そこで,歩行者に対して自動運転車両の行動意図を伝える方法として,外向けヒューマン・マシン・インターフェース(eHMI)が提案されている.しかし現状の多くのeHMIは,主に車両と歩行者が1対1の状況を想定しており,複数の歩行者と複数の自動運転車両が混在する複雑な交通環境を考慮していない問題がある.そこで本研究では,各歩行者に対して1つのeHMIを表示する集約型eHMIと,各歩行者に対して車線ごとにeHMIを表示する分散型eHMIを提案し,複数の自動運転車両と複数の歩行者がいる状況での安全性向上と安心感向上を検討する.
協調型自動運転のための複数路側センサによる環境認識性能向上手法の検討(髙田 陽輝)
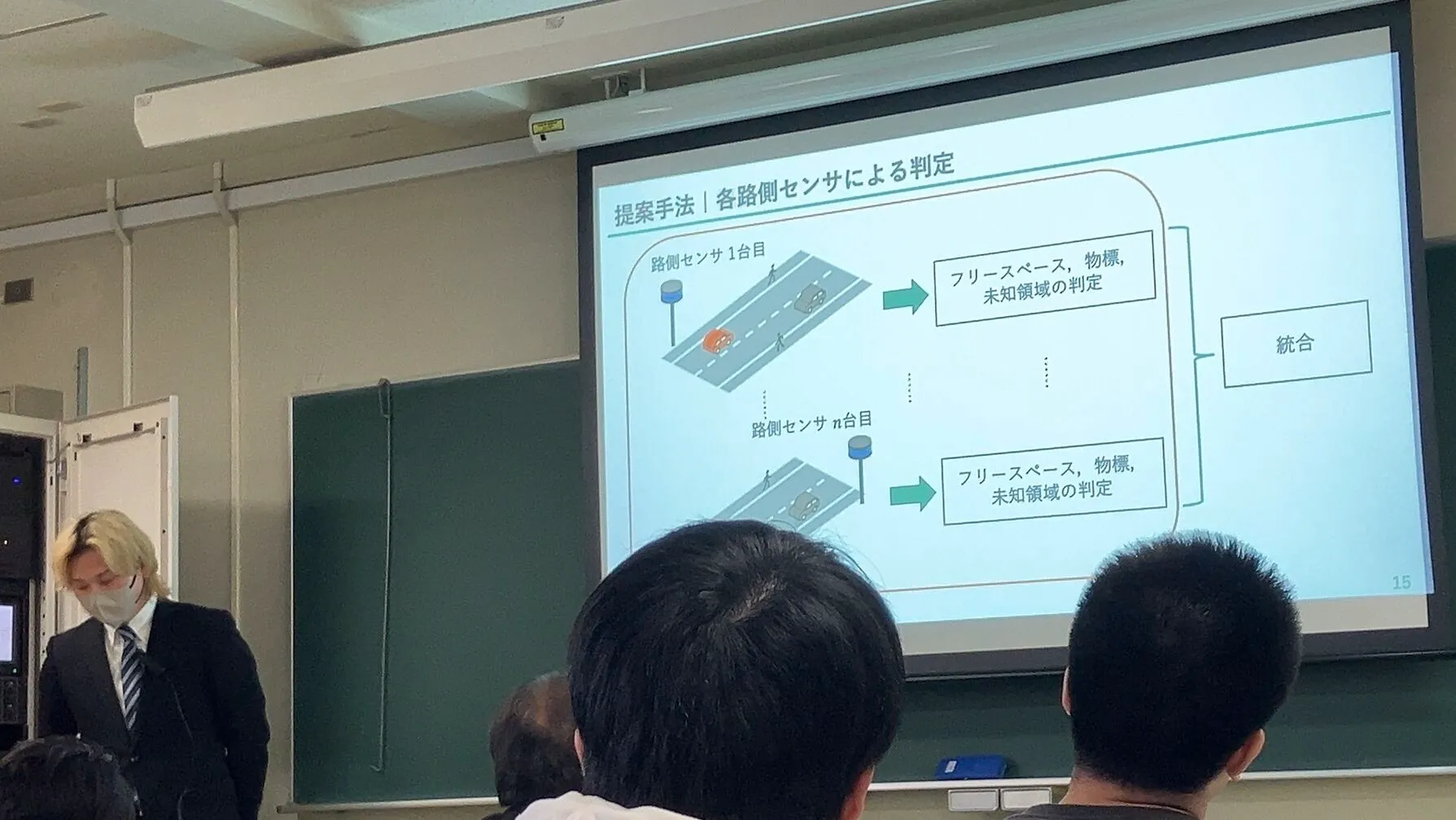
近年,車両が路側センサを備えた路側機や周辺の他車両との間で通信を介して情報共有を行う協調型自動運転が注目されている.協調型自動運転では,センサで検知された車両や歩行者などの物標は,大きさや位置座標などから構成される動的な環境情報である物標情報として共有され,位置関係や走行可能な領域の把握に活用される.しかし,物標情報を取得できなかった領域の安全性は一様と見做される.ゆえに,物標情報のみでは検知できている領域と検知できていない領域(未知領域)を区別できない.そこで,物標が存在せず走行可能な領域であるフリースペースの活用が注目されている.1台の路側センサでのシミュレーションで物標情報と併せてフリースペースを示す動的な環境情報であるフリースペース情報を共有する有効性が示されている.1台の路側センサでは認識に限界があるため,複数路側センサの検知によるフリースペース・物標・未知領域の判定結果を統合することで更なる安全性への貢献が期待できる.しかし,各路側センサの設置位置や観測条件の違いによって,路側センサ間で判定結果が異なる可能性が生じる.ゆえに,複数路側センサの活用に向けて,路側センサ間での不一致な判定結果を統合する手法が不可欠である.そこで,本研究では環境認識性能の向上を目的に,複数路側センサの検知による判定結果を統合する手法を提案する.
Multi-BYTE:BYTEに基づく多段階分類による物体追跡手法(岩井 駿人)
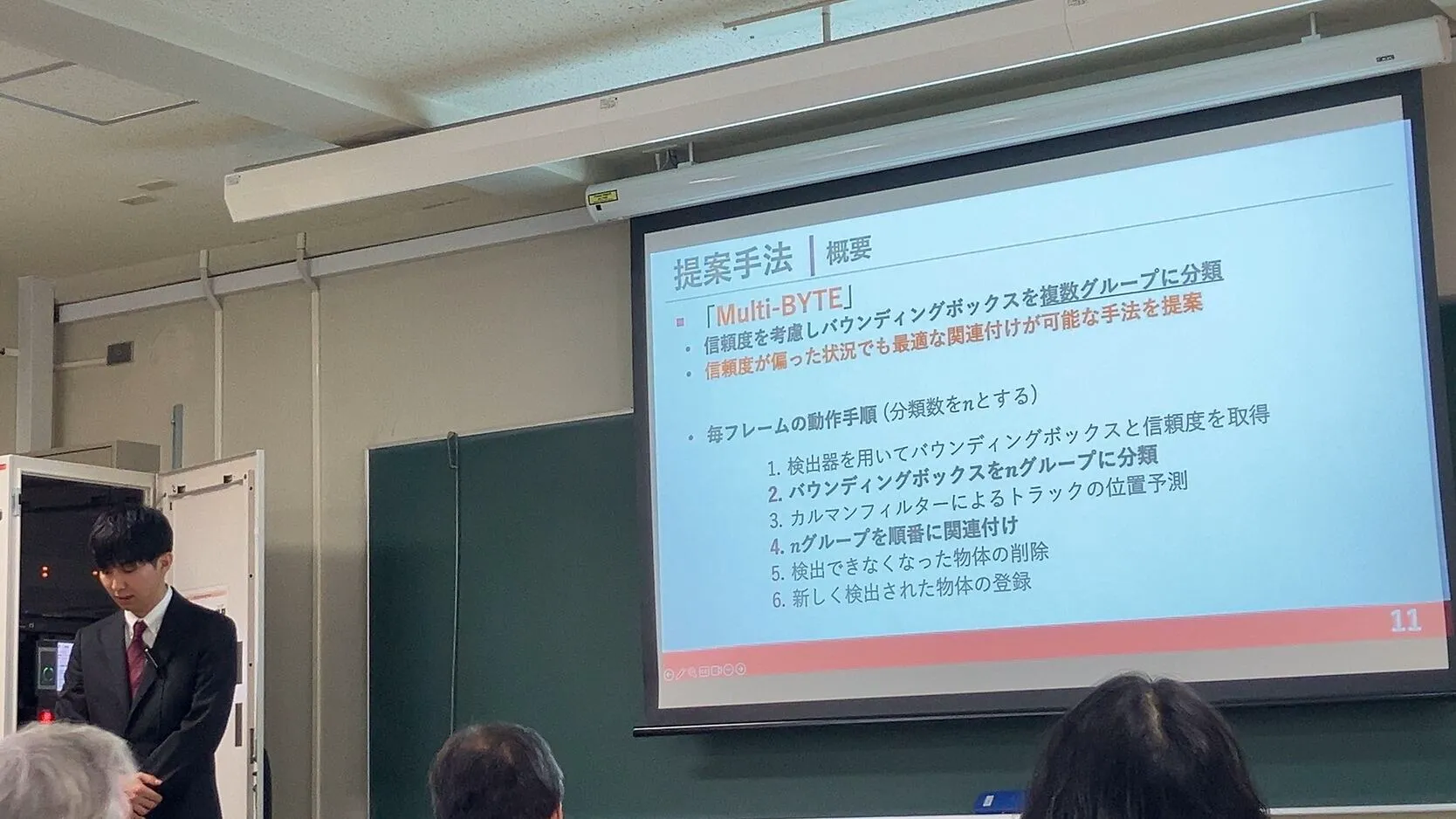
近年,深層学習を中心とした画像認識技術の発展により,動画中の人物や車両など複数対象を同時に追跡するMOT(Multi-Object Tracking:物体追跡) が,監視システム,自動運転など多様な分野で重要になっている.MOT では,各フレームで検出される対象に一貫したIDを付与し続けることで,対象の移動軌跡を推定でき,動線把握や行動分析,危険予測といった上位タスクへ活用できる.一方,実環境では混雑や遮蔽,反射などの影響により,検出結果の信頼度が大きく変動しやすい.その結果,低信頼の検出の増加や,高信頼の検出の欠落により,対象の対応付けが不安定になる.さらに,実環境での導入に際しては,追跡性能だけでなく処理速度も同時に満たす必要がある.そこで本研究では,検出されたバウンディングボックスの信頼度に応じた,多段階分類による関連付けにより,安定したMOT手法の実現を目指す.
車車間通信のためのNR-V2Xユニキャストの有効性検討(松本 翔汰)
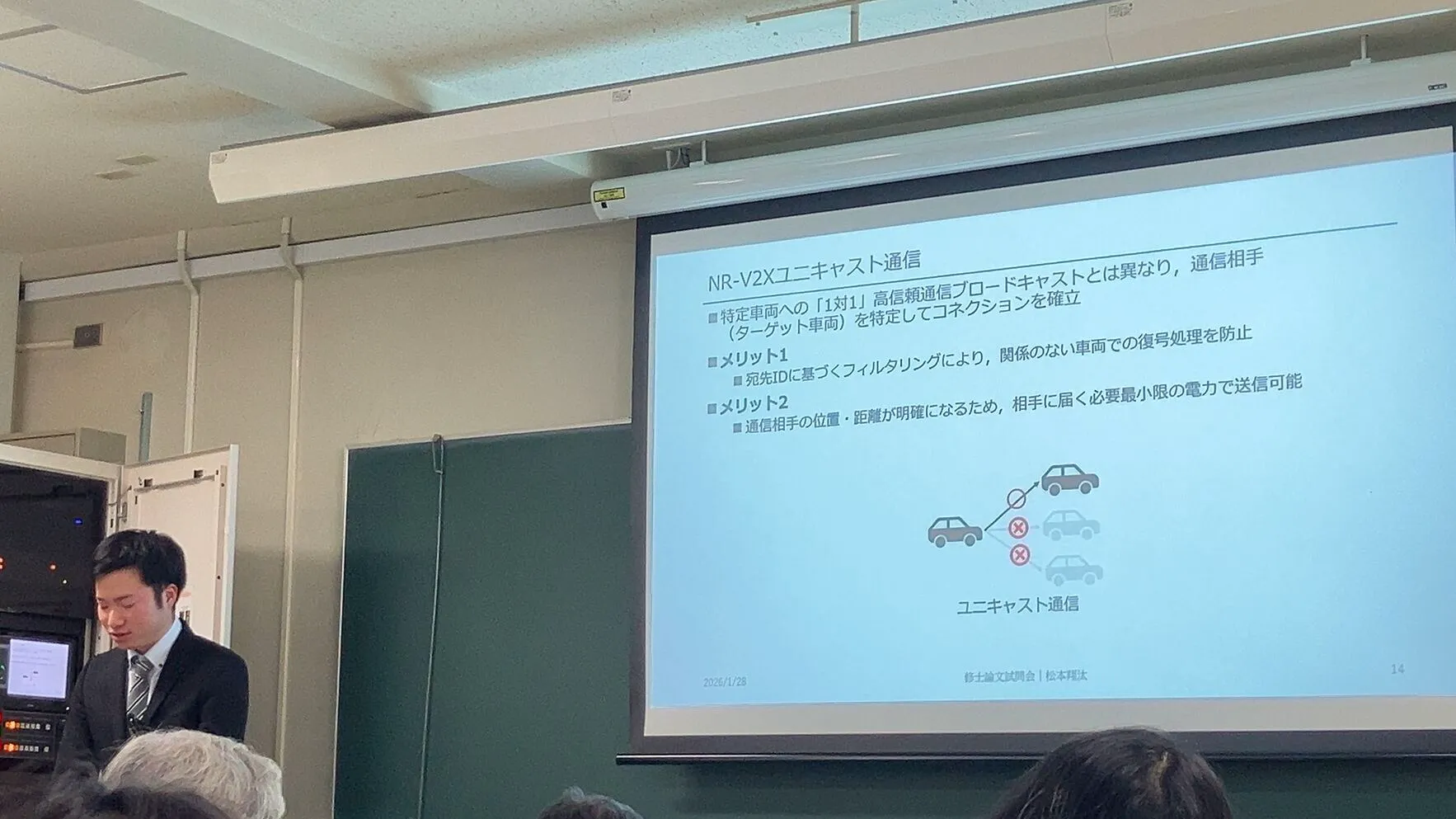
自動運転技術において,車載センサのみに依存する自律型自動運転では,遮蔽物や遠方などの死角状況の把握に限界がある.この課題を解決する手段として,自車のセンサでは検知できない情報を他車両から取得する車車間通信(以下V2V:Vehicle-to-Vehicle) 通信が注目されている.V2V通信を用いることで,周辺車両の正確な位置や速度情報に加え,他車両が検知した障害物情報や走行意図などを共有することが可能となる.V2V 通信の規格にはLTE-V2X(Long Term Evolution V2X)とNR-V2X(NewRadio V2X)が存在する.LTE-V2X はブロードキャスト通信を中心として設計されており,広い通信範囲で通信可能である.一方NR-V2X は5G 通信を使用し,特定の1台の車両にのみに対して直接データを届ける1対1の通信方式であるユニキャスト通信が可能になったことが特徴である.本研究では,V2V 通信において特定の車両に必要な情報を過剰に拡散せずに届けるという観点から,LTE-V2Xのブロードキャスト通信とNR-V2X のユニキャスト通信を同一条件下で比較し,ユニキャスト通信の有効性を定量的に明らかにすることを目的とする.
階層型時空間ボクセル予約による複数ドローンの飛行経路探索手法の提案(梅田 寛斗)
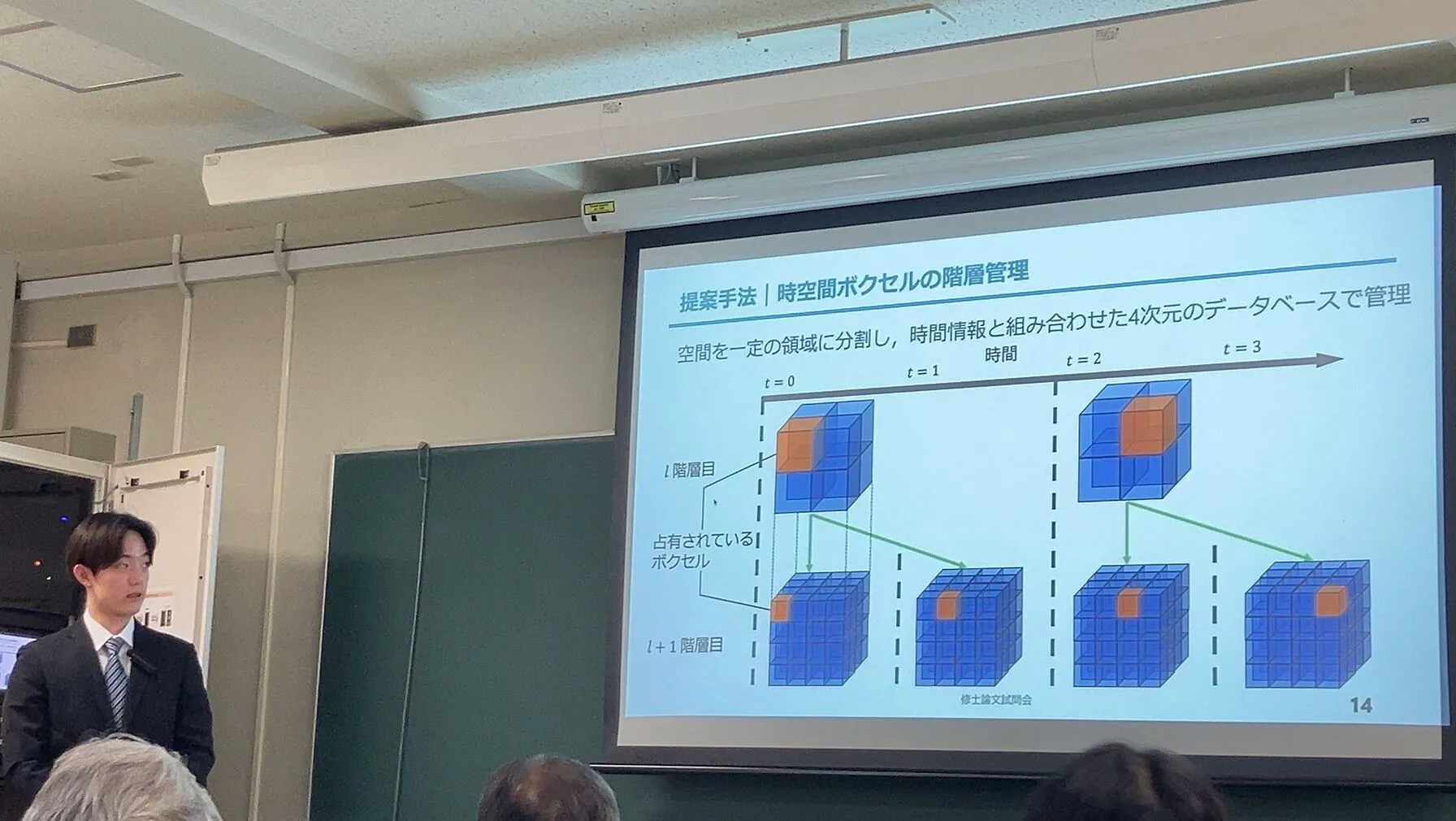
近年,物流,3次元測量,インフラ点検などの分野でドローンの活用が進んでいる.多数のドローンが同一エリアを飛行する環境では,飛行経路の交差により衝突が発生する.衝突回避手法として,センサやカメラを用いて周囲を認識する手法があるが,遠距離の障害物の検出が困難であることや,天候の影響で性能が低下するという課題がある.そこで,通信を用いてドローンの情報を集中制御システムに集約し,全てのドローンの距離を解析することにより衝突を回避する手法が検討されている.しかし,全機の経路を一括で計算する方式では,ドローン数の増加に伴い計算量が膨大になるという問題がある.現在,建造物や飛行体の情報を効率的に管理する手法として,4次元情報の活用が検討されている.これは,3次元空間を直方体の格子状に分割した空間ボクセルに時間情報を統合して管理するシステムであり,時間と空間を一体として扱うことで,より正確な状況把握と制御が可能となる.さらに,空間ボクセルは階層構造で管理され,用途に応じて粒度の調整が可能である.本研究では,空間ボクセルと時間情報を統合した時空間ボクセルを定義し,ドローンが通過予定の時空間ボクセルを事前に予約し,予約情報に基づいて経路探索を行う手法を提案する.また,空間の状況に応じて参照する階層を動的に調整することで,経路探索時の計算時間短縮を目指す.

